Measurements for three-axis workpiece positioner
Skyhook with an elevating link

Three-axis WPP
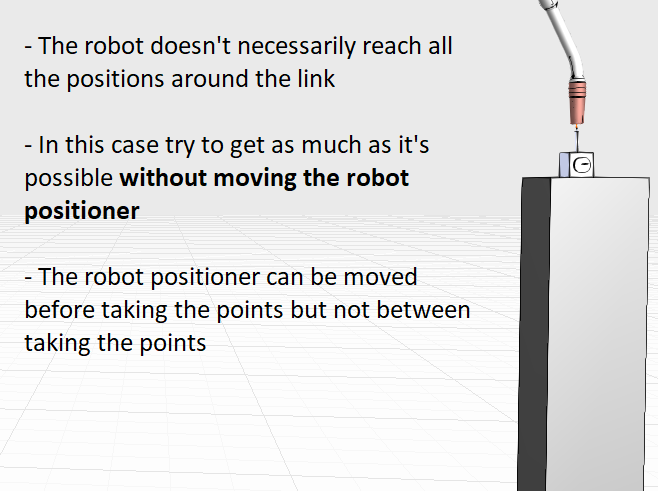
How to take the measurements
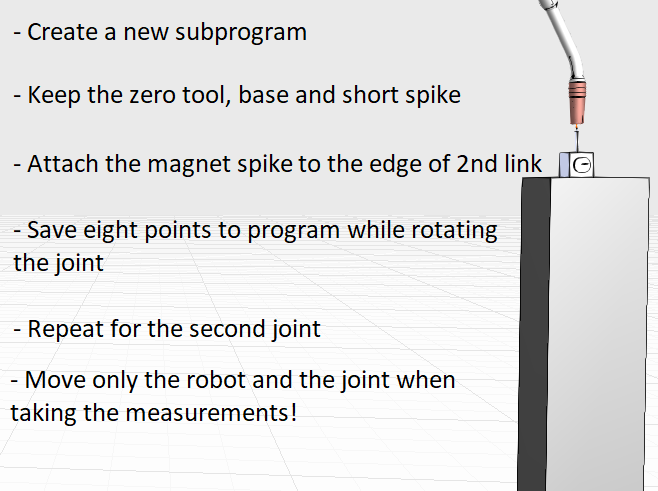
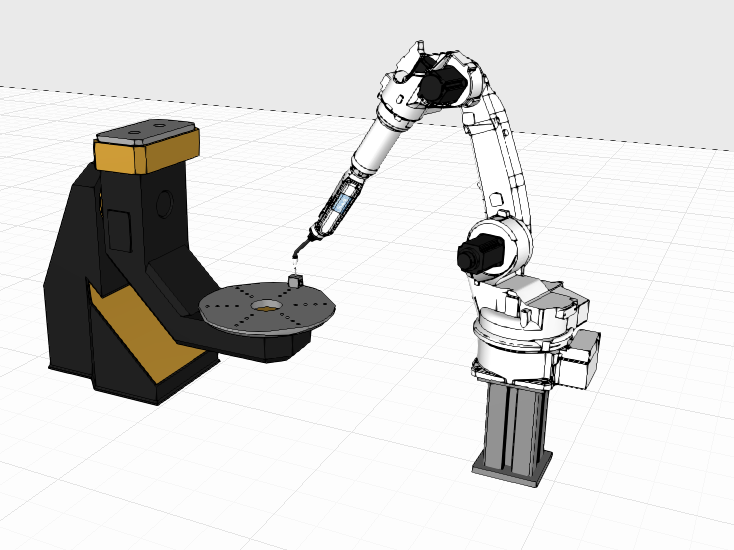
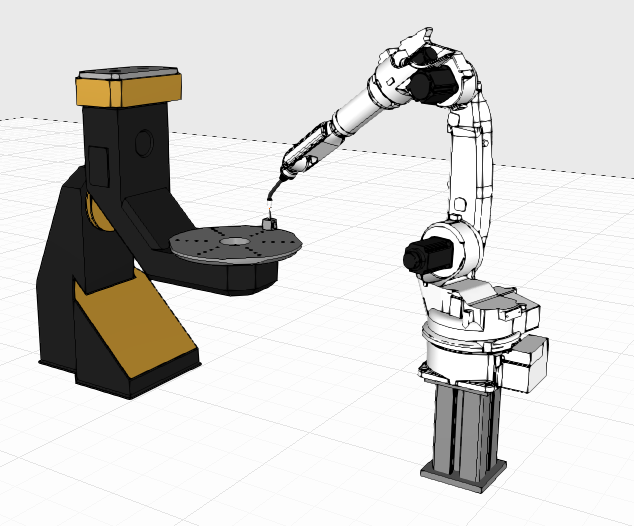
First joint points
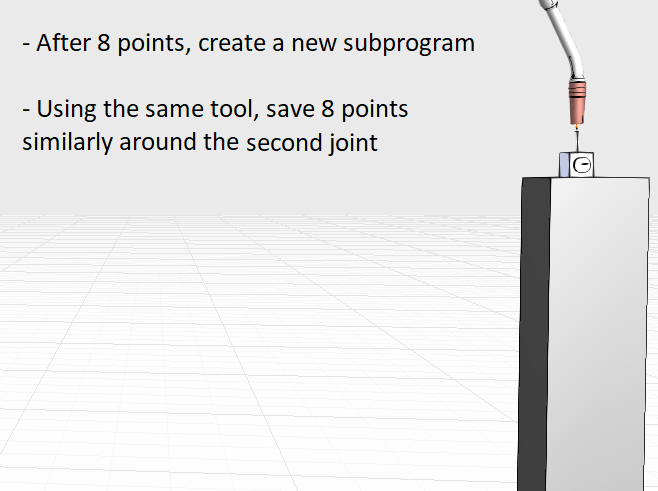
Second joint points
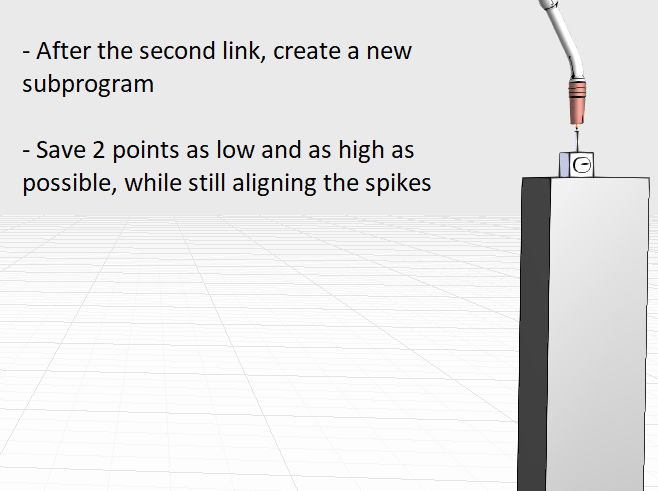
Elevator 1st point
Elevator 2nd point
WPP measurements done!
Measurement checklist:
Setting up the WPP measurements
The measurements for three-axis wpp include the following points:
Keep the same robot settings with zero base, zero tool and short spike attached.
Info - Positioning the magnet spike
Position the magnet as far away from the rotating center as possible.
If robot doesn't reach the flange, attach the spike somewhere in the
positioner where it can be reached and it still rotates around the axis.
For taking the points, Synchro base can be used to move the positioner and the robot synchronously.
Note - Keep other axes stationary
Make sure that the other external axes are stationary while taking the
measurements! Otherwise the calibration will fail!
After WPP calibration, you should have 2 programs with 8 points each and one program with 2 points. If there are more than one positioner, repeat the measurements similarly.
After taking the measurements
Save all the subprograms to a USB-stick from the controller. Name the programs logically so, that they are distinguishable.