Robot to robot calibration
Calibration to master and slave robots

Robot-robot calibration
How to take the measurements
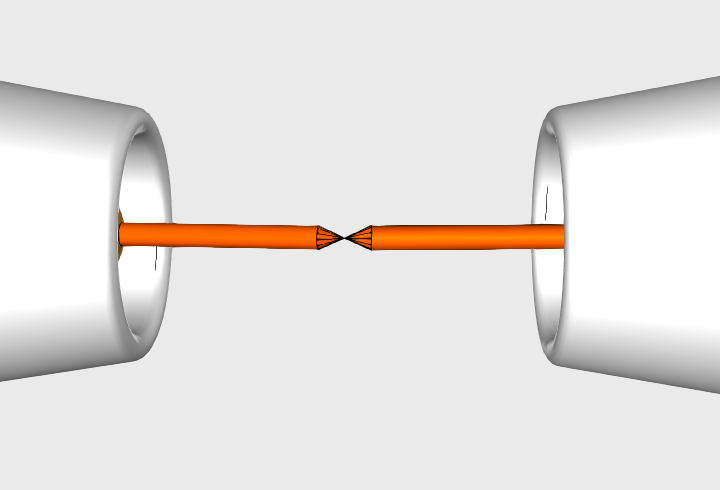
Align the spikes exactly
Saved points
Robot-robot measurements done!
Measurement checklist:
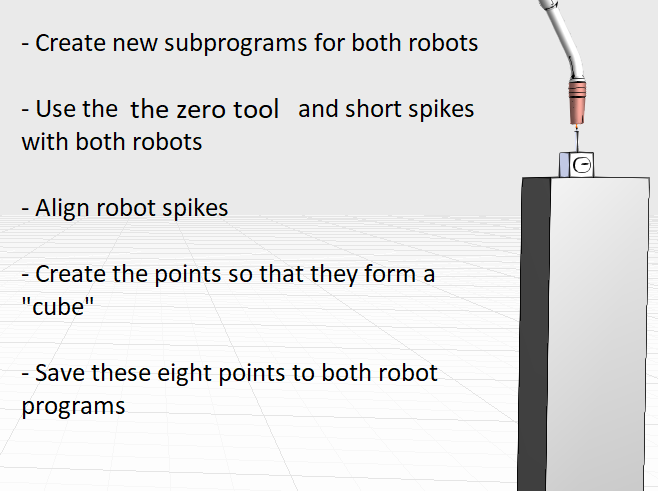
Robot to robot measurements
Use the zero tool, same base and the short spike with both robots when saving the points. Create new programs for both robots and jog them so that their spikes are aligned. Save a PTP point for both robots and jog them aroung the work envelope so, that the points form the corners of a cube. Try to cover as big of an area as possible to get the best possible accuracy. Repeat this until you have 8 points.
Note - Keep other axes stationary
Make sure you only move the robots when taking the measurements.
After robot-robot calibration, you should have 2 programs with 8 points each.
After taking the measurements
Save all the subprograms to a USB-stick from the controller.