Robot track measurements
The track needs to be measured using the calibrated TCP.

Measurement checklist:
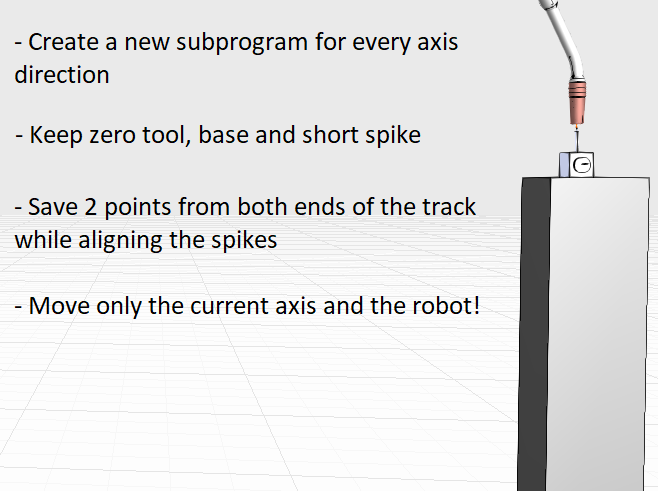
Setting up the track measurements
Keep the same robot settings with zero base, zero tool and short spike, and attach the magnet spike somewhere so that the robot can reach the spike easily.
Info - Positioning the magnet spike
Position the magnet spike so, that the robot reaches it and it allows
the track axis to move as much as possible during the measurement.
This results in a higher calibration accuracy.
Save one point so that the robot is on the one end of the gantry axis and second when the robot is on the other end of the same axis. Make sure that in the second point the spike tips match exactly, move only the robot joints to match the points.
Note - Keep other axes stationary
Make sure that the other external axes are stationary while taking the
measurements! Otherwise the calibration won't succeed!
After track calibration, you should have one 2 point program.
After taking the measurements
Save the program to a USB-stick from the controller.