Joint offsets & directions
Set layout data
Joint offsets & directions
How to set Joint offsets & directions
Joint offsets & directions done!
Joint offsets & directions
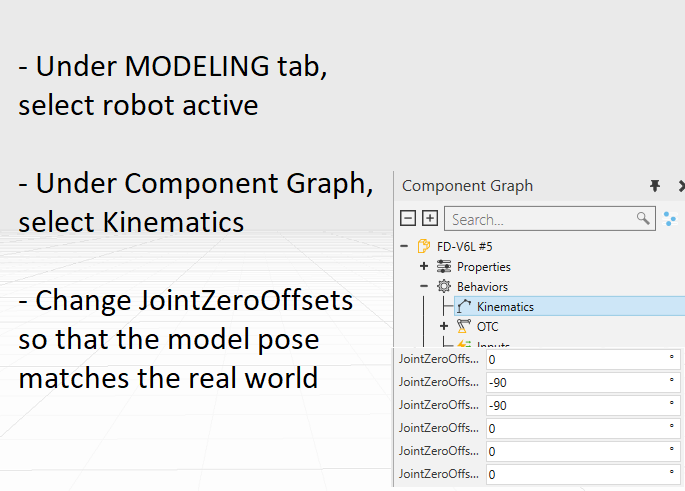
If robot is taken from the eCatalog, Joint offsets and limits should
be automatically correct. However if this is not the case, these
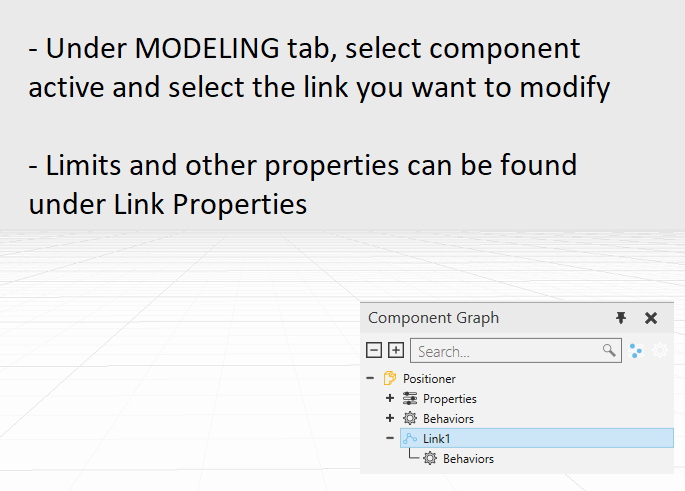
can be changed under Modeling tab > Component Graph > Kinematics > JointZeroOffsets and
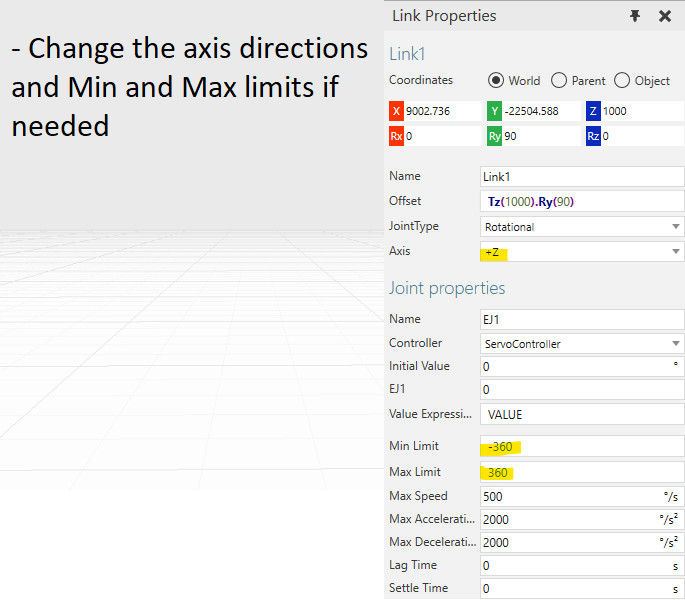
Component Graph > Link Properties > Min and Max joint limits.
Back to joint offsets