TCP Position
TCP position is always the first one to calibrate
Calibration checklist:
Uploading the points and creating the tool
The points need to be uploaded with the same tool that was used to take the points. Usually this is the zero tool, which means that any tool can be chosen if its values are all 0. Delfoi uses the same tool index that was used in the robot controller, so make sure that the indexes that you use match the robot system. If not, you need to touch-up the points with the correct tool. You can check the that the point positions are in correct tool, if you jog through the points and the tip of the torch appears to stay relatively well in the same place.
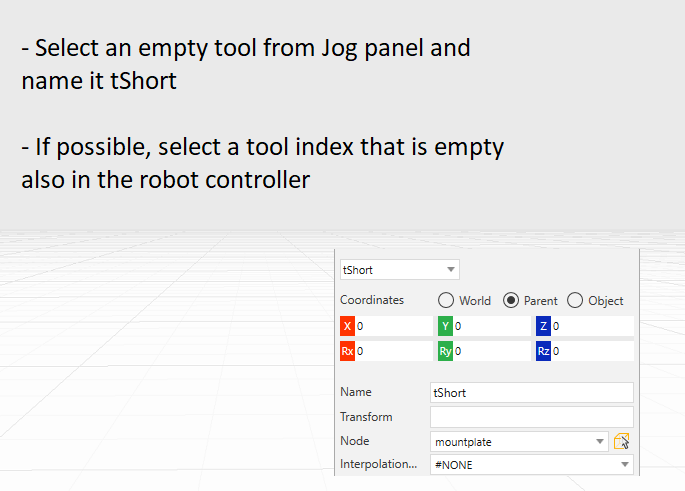
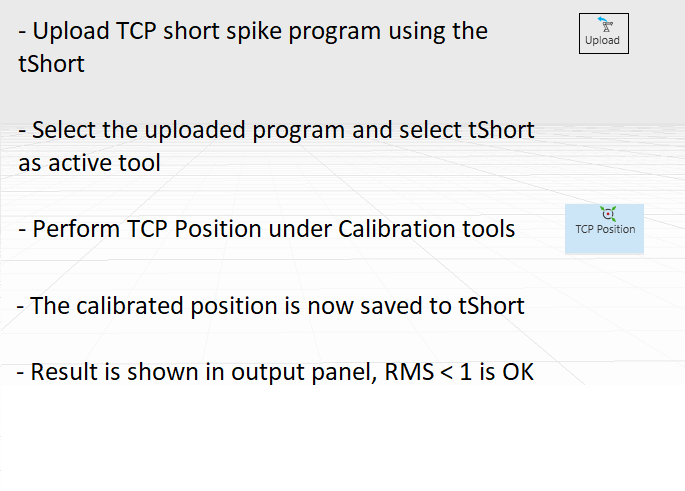
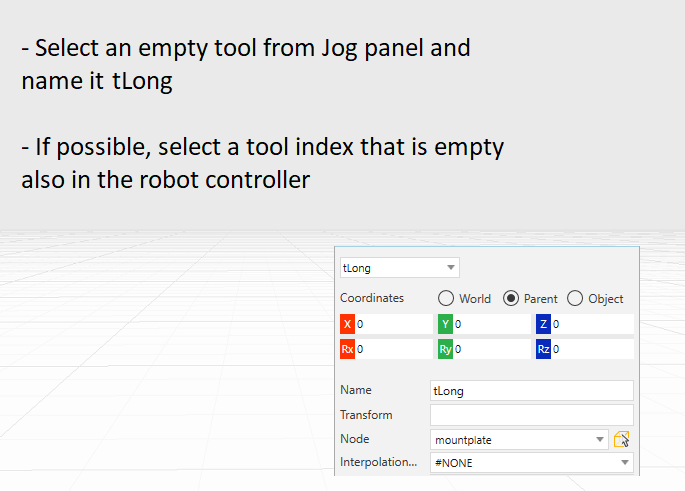
After this you need an empty tool tShort, where the TCP will be calibrated. While having this tool active, click the uploaded subroutine active and perform TCP Position calibration. Do this for both short and long spike.
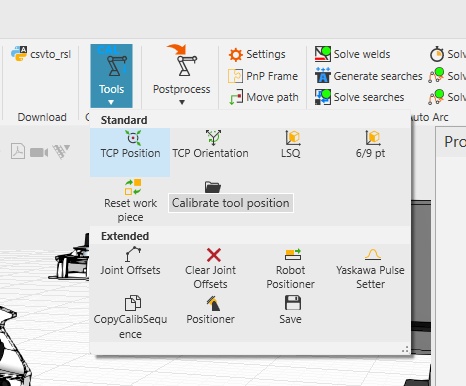
TCP position calibration
The result of the calibration is shown in the output panel. If RMS is less than 1, the results are OK. However if RMS is over 1, corrective actions need to be considered, such as Joint offset calibration.