TCP for camera laser
Find the TCP for a laser that forms a fan

Laser TCP
How to calibrate
Calibrate plate position in Delfoi with LSQ
Create a search in Delfoi and run it with robot
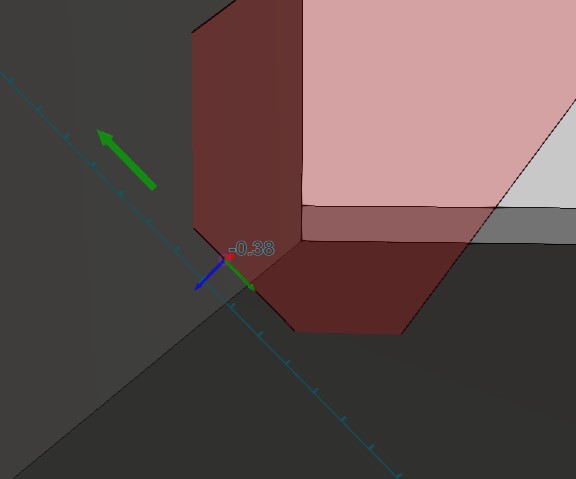
FIx TCP by the amount of search correction
Repeat until TCP is accurate enough
Laser camera calibration done!
Measurement checklist:
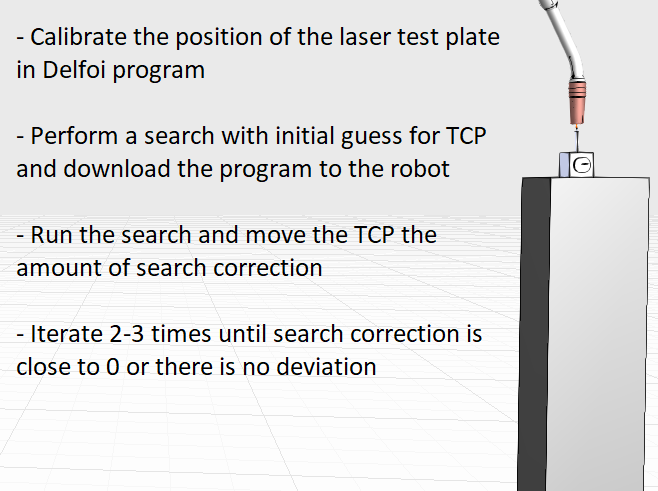
Performing the calibration
For the camera laser, there is no specific calibration algorithm, but instead it needs to be performed manually using an iterative method. In this method, the laser TCP is moved manually after individual searches as long as it's needed to find a position where it performs the searches successfully. For this a test plate with exactly 90 degree angle is needed.
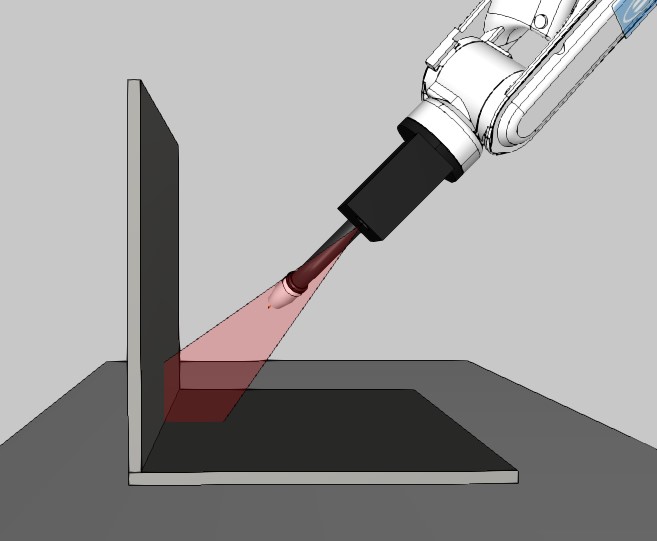
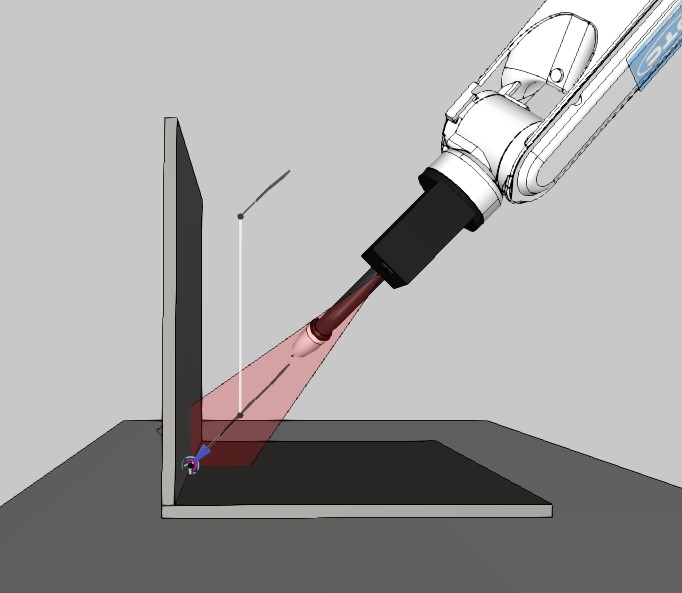
Laser test plate needed for iteration
Iteration method
First make a guess for the laser TCP in Delfoi program and create a 2D search for the test plate. Download this program and run the search with the robot. See the search results or corrections from the robot code (new corrected coordinates / P-varibles / etc..) and move the laser TCP in Delfoi by the amount of the search correction. Repeat this until search corrections are close to 0 and the searches work well.