Robot-robot calibration
How to calibrate master and slave robots
Calibration checklist:
Calibrating two robots
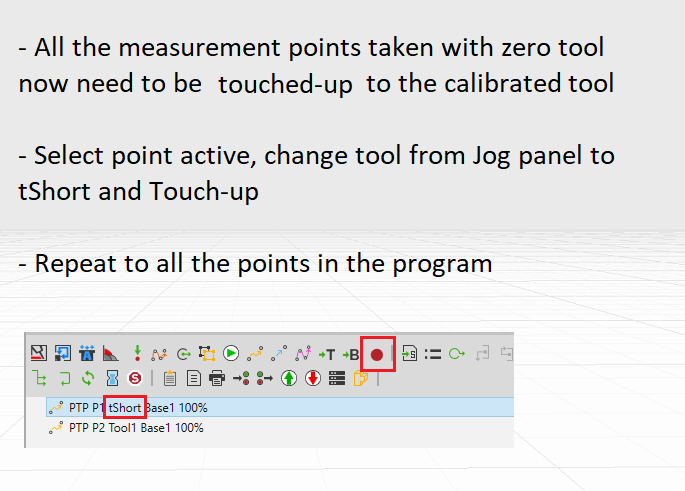
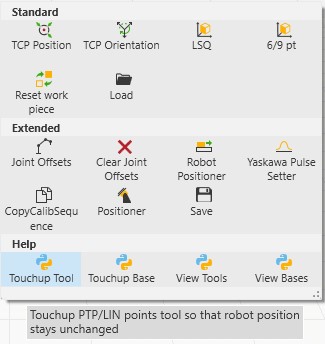
In robot-robot calibration it is assumed that robot R1 is already in the correct location, and thus R1 is used ar a reference to calibrate R2. First upload both robot-robot measurement to both robots respectively. Touch-up the points by selecting the Touch-up tool from calibration help tools. Select the scope for current sequence and the tool to the one that has the short spike data and click ChangeTool.
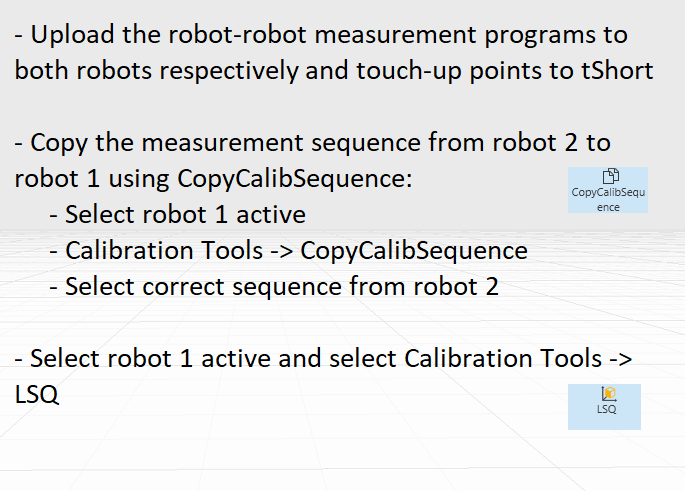
Then copy the uploaded sequence from R2 to R1:
Then click on robot R1 and select Calibration Tools -> LSQ.
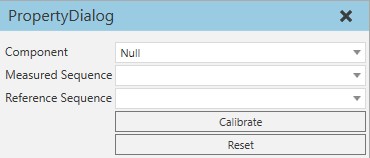
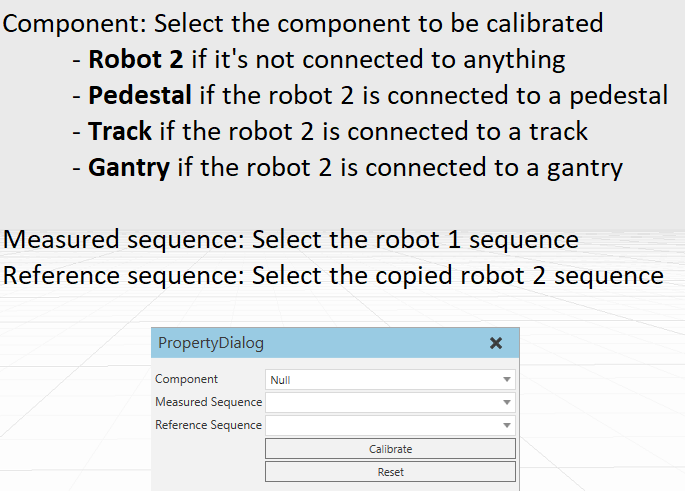
Measured sequence is the robot R1 sequence and reference sequence is the copied robot R2 sequence.
After hitting Calibrate, the position of the component is automatically changed and the LSQ error can be seen from the output panel. The calibration result can be reset by hitting Reset.