Joint offset calibration
If the TCP RMS is not acceptable, calibrate joint offsets
When to perform joint offset calibration
If you are using a robot that uses either joint values or pulses for the kinematic calculation, you can use the joint offset calibration to get rid of the inaccuracies in the robot joints.
Joint offset calibration
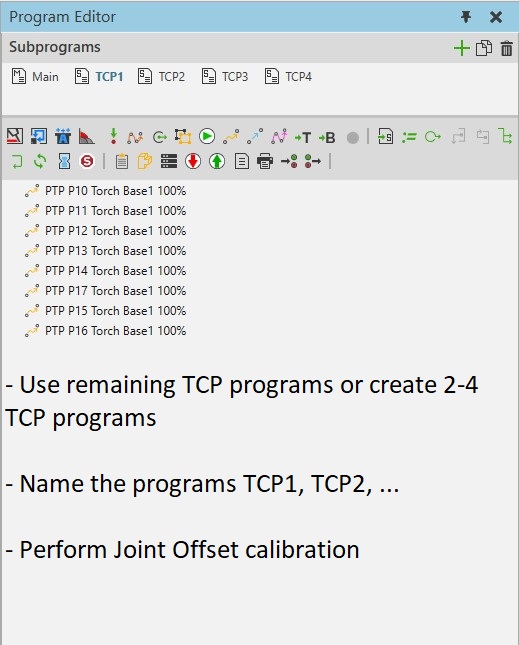
Name the existing TCP programs to TCP1, TCP2, TCP3,
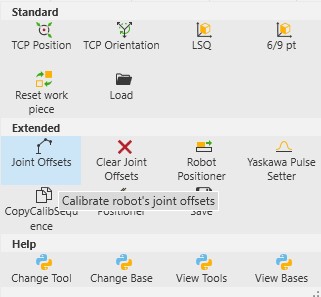
... etc. and select Joint Offsets from the Extended calibration
tools. If you have only one TCP measurement, it is
suggested that you use at least 3 different TCP measurements that are taken from
different sides of the robot in order to best compensate for the offsets. For taking
the measurements, both short and long spike can be used.
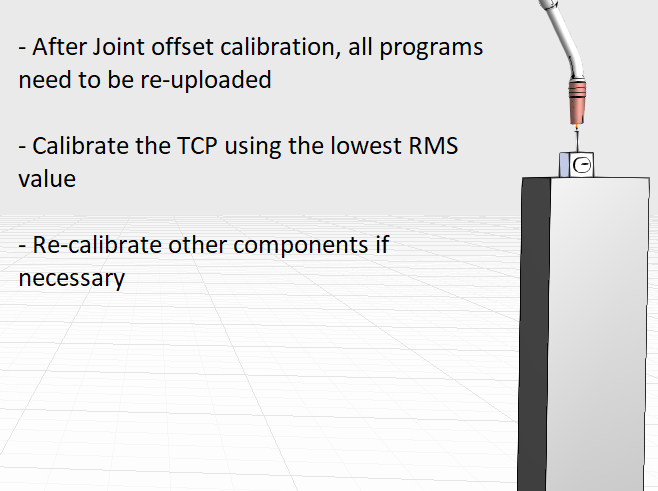
After performing Joint Offsets, the offsets are automatically set to the robot and
previously uploaded measurement programs and calibrations are not valid anymore.
To continue, all measurement programs need to be deleted and uploaded again
and all calibrations need to be repeated. For TCP calibration,
use the program that previously had the best RMS value.
The performed Joint Offset calibration can also be cleared with Clear Joint
Offsets. After this, the offsets for the robot are returned to default values.